

Dynamics and control of a family of gravity powered robotic mechanisms
Preface: The goal of this research is to develop a family of energetically efficient versatile robots that can produce stable gait over wide range of terrain conditions. Each robot is a family member that is considered to perform its own locomotion gaits which are identified throughout gravity powered locomotion study. One cannot ignore the promise of robots that can walk by using very little energy since Gravity powered bipeds provide ample proof that this is possible. It is conceivable that mechanisms that are much simpler than legged robots can also produce gravity powered locomotion. In addition, evolutionary biology teaches us that one can learn a great deal by studying the hereditary traits of organisms that evolve over generations. Thus, we foresee great benefits in analyzing a chain of mechanisms that span from the very simple to the progressively more complicated. Hence, our goal is to generate a family of planar mechanisms, with members that can be as simple as a bouncing ball or as complex as a five link biped. It is quite possible that we may discover new locomotion modes that have never been seen before. Such motions may play important roles in providing additional navigation tools for mobile robotic mechanisms. Finally, we anticipate that the conclusion of the proposed research will pave way to an energetically efficient, versatile, reconfigurable robotic system that can perform a wide class of locomotion tasks.
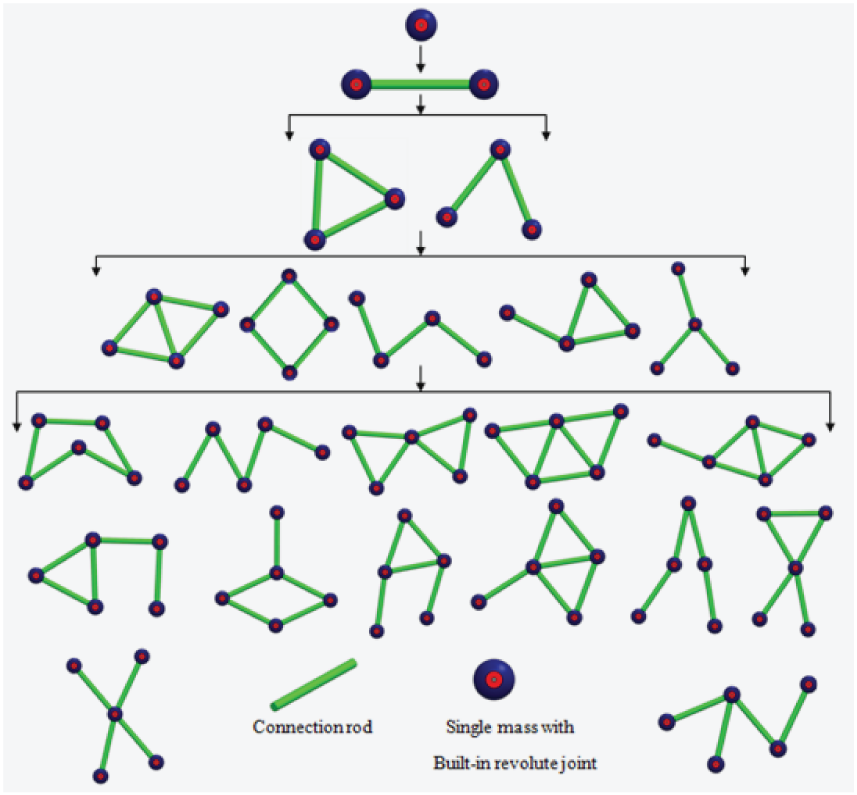
Family tree of our locomotion systems.
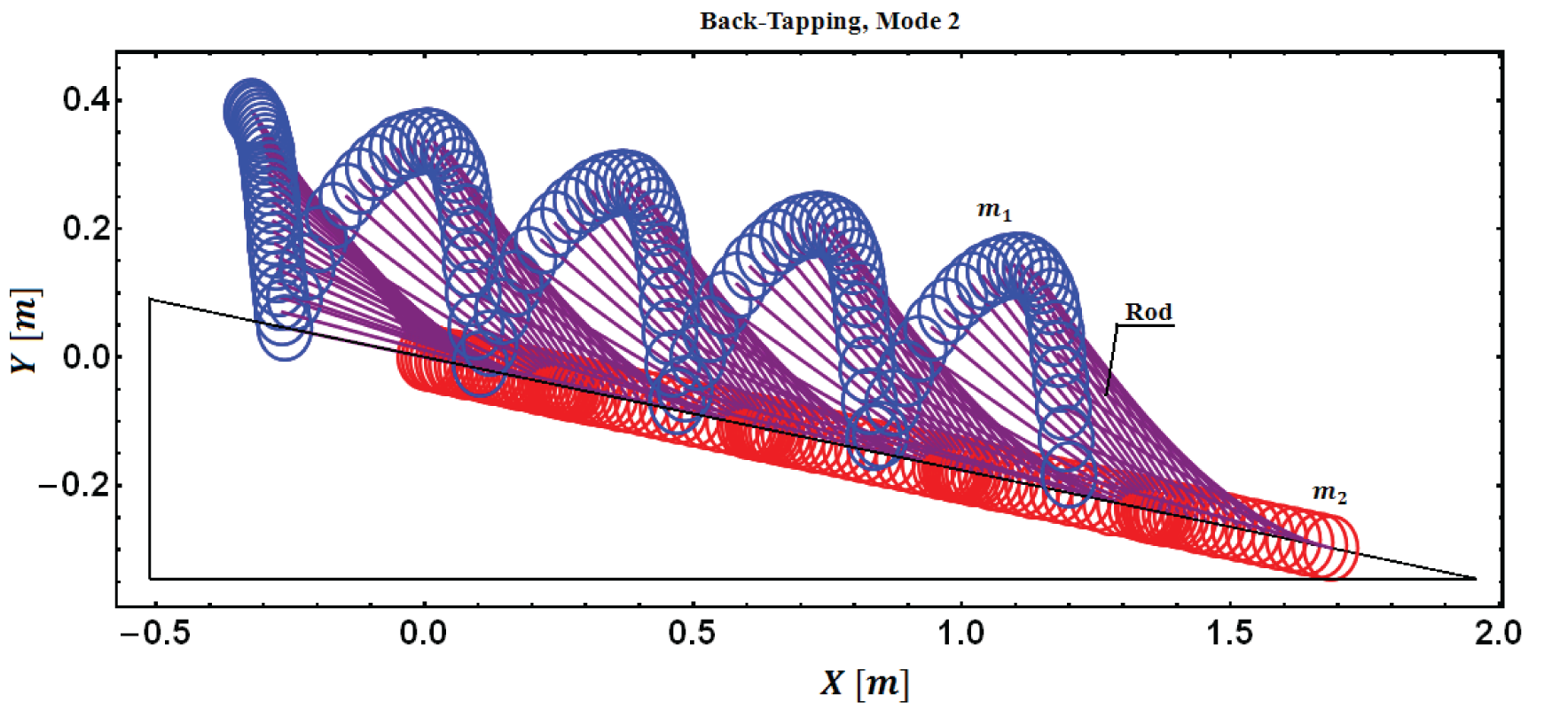
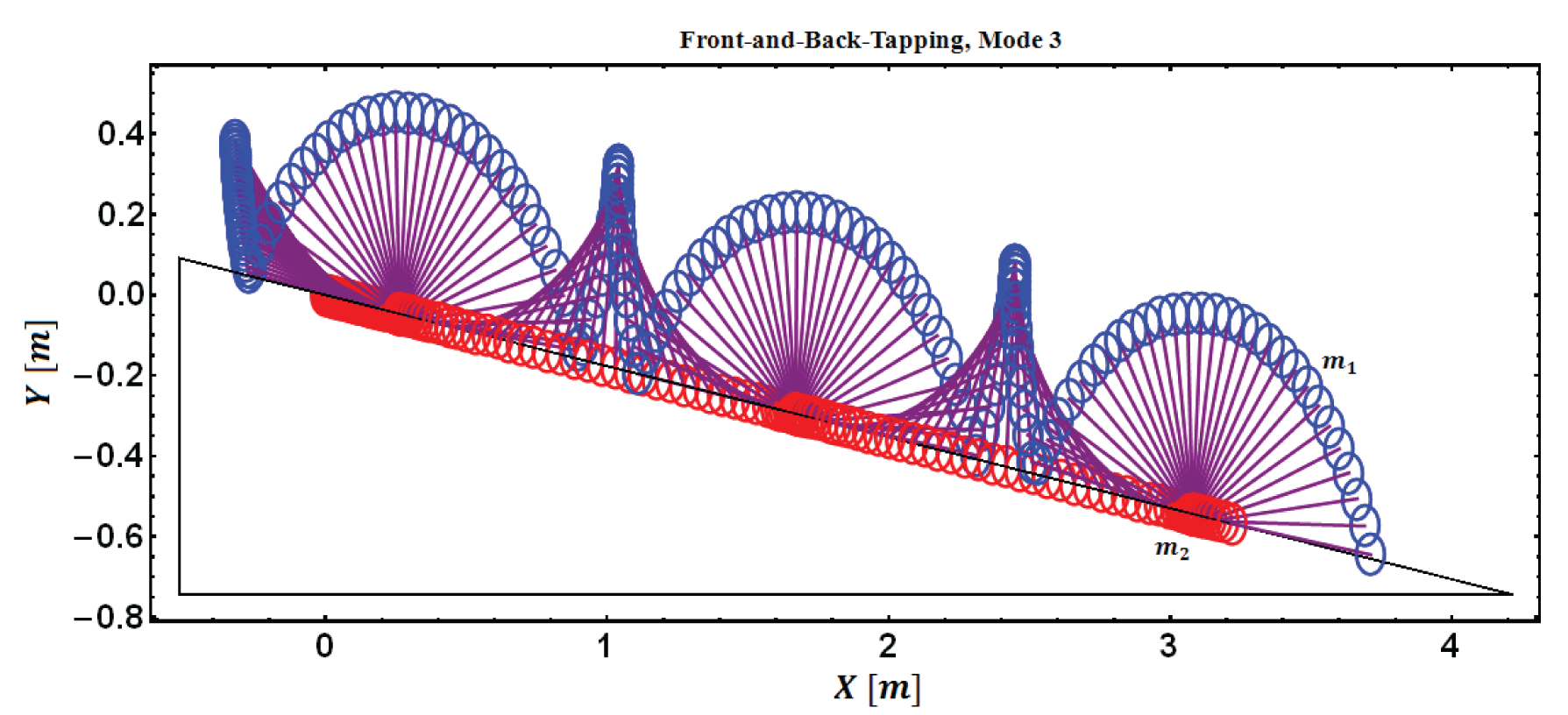
Approach: We study the gravity powered locomotion of the members of this family by placing them on inclined planes. Our goal is to use this platform to conduct a search for the modes of gaits generated by the members of a family of passive locomotion robots. Some of these modes are already well known, such as the bipeds]. But, we believe that there are other modes that may provide original gait patterns that have not been seen or analyzed before. We do not claim that we will be able to identify all possible gait patterns of all the robots in our family. Yet, we have already identified three tapping motions in baton shaped robots [1]. We can already see that the next generation robots after the baton are going to have crawling and worm like gaits. Therefore, we believe that we will encounter many new forms of original robotic locomotion modes as we work our way in the hierarchy. In addition, some of these locomotion modes may have unique features that make them valuable in practical applications (such as the tapping modes of a baton are ideal for locomotion in very tight areas). Once we catalog the passive modes of motion for a particular robot, we will place an analogous active one to perform the passive gaits on a surface with arbitrary slopes. We have already developed impulsive actuation control method for the first two generation of our family [1]. We believe that this approach constitutes a sound foundation to build upon and expand to the control of more complex members.
 |
 |
 |
Front-tapping; Mode1 Video |
Back-tapping; Mode2 Video |
Front-back-tapping; Mode3 Video |
[1] Ali Tavakoli, Yildirim Hurmuzlu, (2009), Gravity Powered locomotion and active control of two simple systems. Proceedings of ASME Dynamics and Control Conference (DSCC 2009), Oct. 12-14, Hollywood, CA.
Experimental study: We will develop a basic hardware kit to build any robot in the family tree. Each robot is built out of the kit parts that we have designed and propose to develop. The first version of the kit will be parts that are joined manually together. We do intend, however, eventually to develop a more advanced kit that results in dynamically reconfigurable locomotors. This will be the final objective of this research.
 |
 |
 |
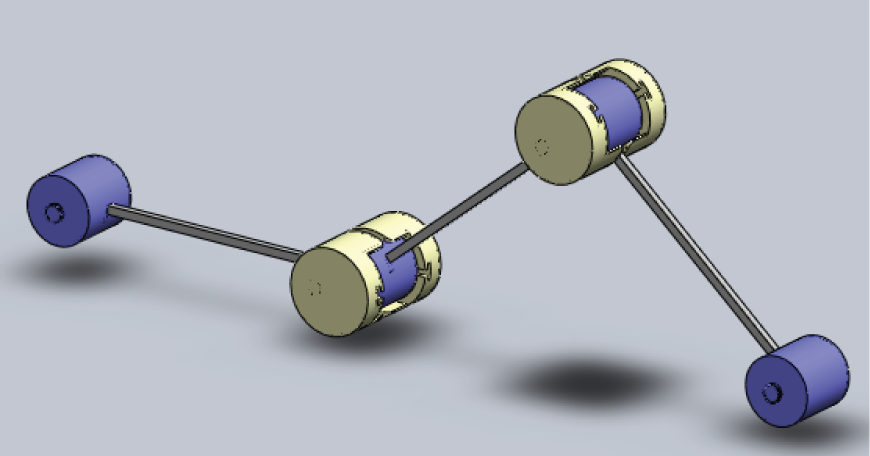
Baton, Female and Male |
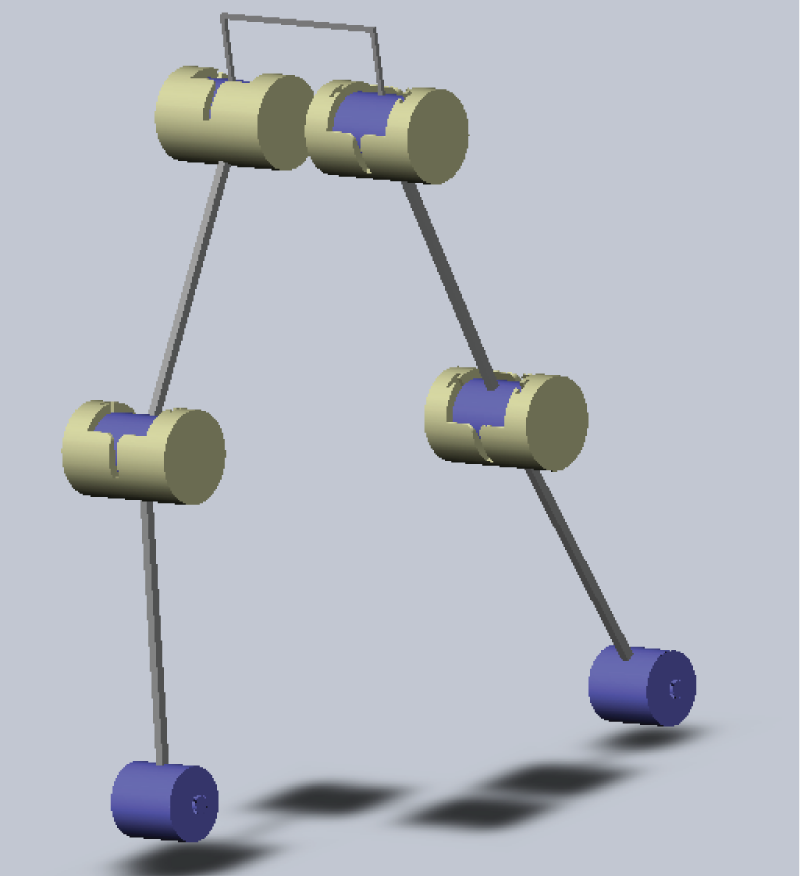
Worm-like three link system |
Biped |
So far we have experimented with several baton prototypes. We tested the idea of using one impulsive actuator to maintain the tapping gaits of baton (as we planned in our control method).
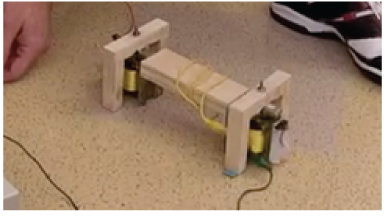
We started with using two massive Electromagnets mounted inside brackets having two feet on the ground (see Fig. (a)). The two brackets were connected together to form a baton. With this setup, we were able to produce the tapping mode of the baton by applying voltage pulses to only one of the electromagnets (exerting a downward impulsive force against the ground throwing the electromagnet off the ground) after every ground impact. Hence we could verify that providing a constant magnitude impulsive force after each ground impact would maintain the tapping gait we found in the passive study. But since the coils are heavy and they require high current, we moved on to the use of Pneumatic actuators.
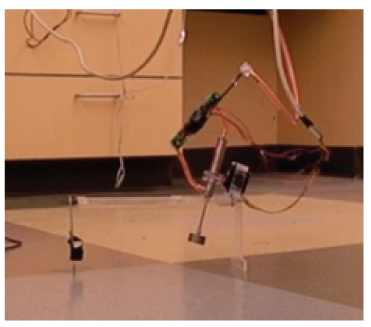
In the remaining prototypes we developed our own Pneumatic actuator that could produce an impulsive force along a desired angle. The impulsive force is achieved by transferring the kinetic energy of a mass driven by a pneumatic cylinder to the tapping end of the baton. We used pneumatics for our prototype since it has a quick response time, it is lightweight and we had readily available cylinders and compressed air in our laboratory. Consequently, we placed the actuator at different fixed angles (angle β with respect to the ground) and we could initiate and sustain the tapping motion of the baton on the level ground. In the next prototype we attached the cylinder body to a small motor to dynamically change angle of actuation β with a joystick running via Labview software. Hence, we were able to make the baton tap slower or faster upon pushing forward or pulling backward the joystick. In the last prototype, we added another small motor to the previous set up that could rotate the motor off the plane. In this way we could steer the tapping baton to the sides (turning right/left) by simply turning a joystick sideways.
 |
 |
|
Electromagnetic (Solenoid), Ali_V4 Watch the Video |
Pneumatic: fixed-fixed angle, Ali_V5 Watch the Video |
|
 |
 |
|
Pneumatic: fixed-free angle, Ali_V6 Watch the Video |
Pneumatic: fixed-free angle, Ali_V7 Watch the Video |
![]()
SMU Home | SMU Lyle Home | Engineering Help | Contact Webteam
© Southern Methodist University, Dallas, Texas