

Pony Robot
Baton Locomotor with Inertial Actuation
Preface: A baton is a member of a family tree of robotic mechanisms. It consists of two masses connected with a connection rod. This locomotor can exhibit different gaits, summarized as follows: front tapping, back tapping, back-and-forth tapping, hopping, galloping, and tumbling (See Fig. 1). Pony I was a robotic baton prototype that employed inertial actuation, instead of impulsive (\cite{zoghzoghy}), as the latter system faced many challenges when it came to implementation. The actuation system in Pony I consisted of a spinning mass/pendulum, rotating at one end of the baton and generating an inertial force that is capable of driving the baton. The success of the inertial actuation we saw in the first generation of Pony robots led us to the development of an improved system. This actuation system is called the double-action actuation. One can control the direction and magnitude of the resultant inertial force by employing two spinning masses/pendulums (or spinners) at one end, turning in opposite direction. We present the model of the baton with double-action actuation in Fig. 2. Then we use numerical solving of the nonlinear model to explore and simulate various types of gaits that could be generated with this system. Consequently, we study the stability of the resulting gaits using linearized Poincare maps and Floquet multipliers. Finally, we conduct a structural stability analyses to explore the effect of parameters on the system.
 |
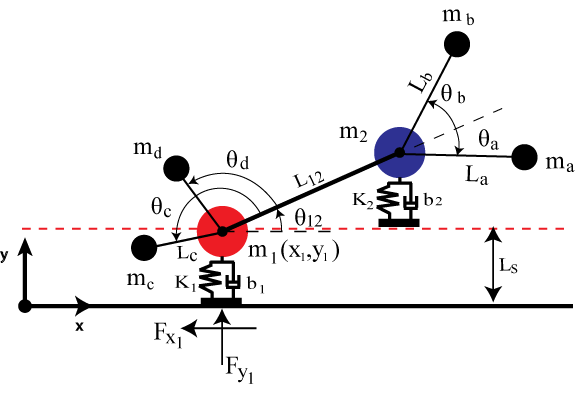 |
Fig. 1. Gaits: (a) Hopping ball (b) Hopping baton (c) Galloping baton (d) Hopping baton (e) Front Tapping baton (f) Back-and-Front Tapping baton (g) Tumbling baton |
Fig. 2. Diagram for a baton with the double-action system on both ends. |
Approach: We proposed a planar model for the baton locomotor, consisting of two concentrated masses at the ends of the rod. Spring legs were used to cushion the effect of impacts, and conserve the energy of the system. We present a more advanced actuation mechanism with two spinners at each end of the rod, rotating in opposite directions. The spinners cross twice every full rotation cycle at the rendez-vous angle, generating a sinusoidal force along the direction of the rendez-vous points. The magnitude and direction of this force are imposed by the angular velocities and posistions of the spinners. We demonstrate with numerical simulations that this actuation method can generate several gaits: dragging, tapping, galloping and hopping. In addition, we investigate the feasibility of two different control methods (PID and SMC) that help maintain the periodic gaits. Finally, we demonstrate that our robotic baton, Pony II, was successful at generating all the studied gaits using numerical simulations. Pony II can progress on icy and lubricated surfaces, as well as on general ground surfaces.
Dragging gait: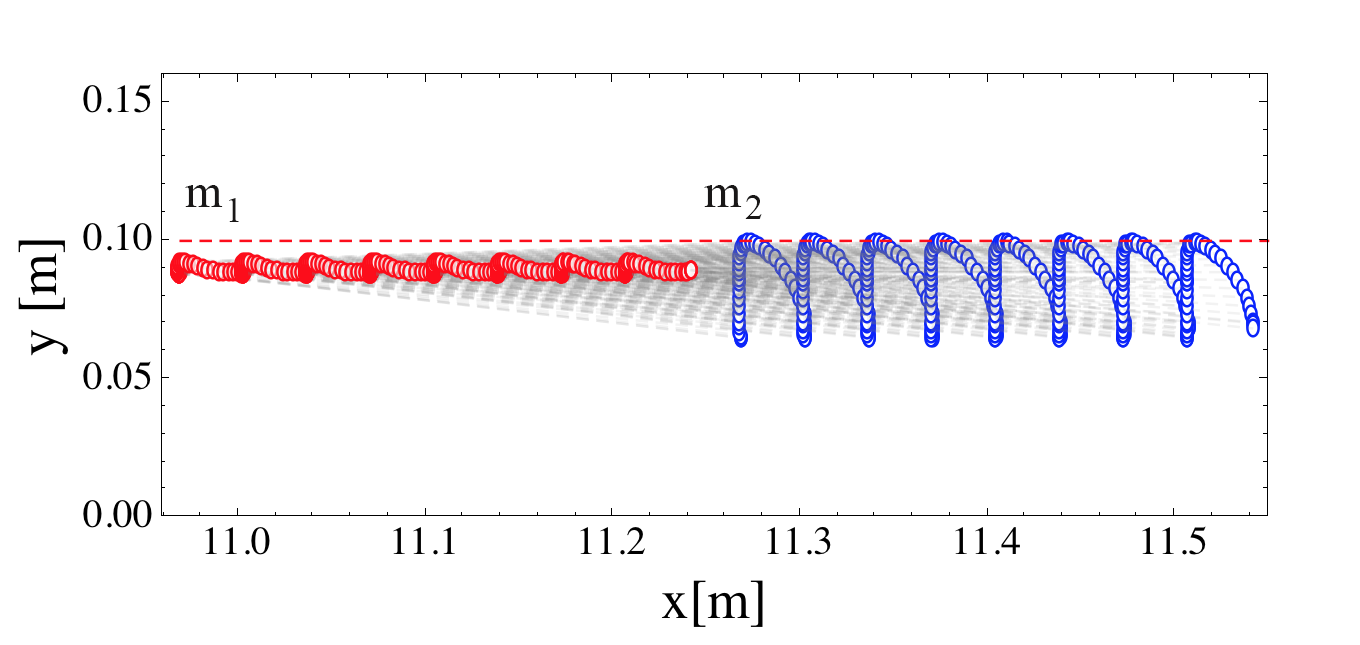 |
![]()
SMU Home | SMU Lyle Home | Engineering Help | Contact Webteam
© Southern Methodist University, Dallas, Texas