Unsteady, Biological, and Bio-Inspired Propulsion
Experimental Fluid Dynamics Laboratory
Department of Mechanical Engineering
Southern
Projects:
Small flight-capable or submersible vehicles are of great technological interest because their diminutive size permits increased portability and access to otherwise inaccessible locations. Applications for such vehicles range from battlefield/urban surveillance to undersea exploration of small caverns to precise drug delivery within patients and microsurgery. The present investigation is focused on extending pulsed-jet propulsion schemes to the micropropulsion level (i.e., involving vehicles less than 1 mm in size). Pulsed jets – consisting of a series of jet pulses – are appealing for micropropulsion because the pulsatile nature of the flow engenders vortex ring formation with each pulse (see fluid entrainment by vortex rings project), which leads to relatively large thrust and potentially high efficiencies (higher than those achieved with traditional propulsion schemes at small scales). Additionally, they are relatively simple to implement mechanically and can be readily manufactured at the micro scale.
To investigate pulsed jets as candidates for micropropulsion applications, a self-propelled pulsed-jet vehicle (‘Robosquid’) has been developed. By oscillating a piston, Robosquid (see photo below) can generate jets of precise duration, peak jet velocity, and pulse frequency. Check valves in the piston and between the inlets and piston prevent backflow as the piston is retracted. Robosquid is supported on a nearly frictionless airtrack to simulate self-propelled conditions.
|
|
|
Photo
of Robosquid |

Investigations with Robosquid are
focused on evaluating its performance in the micropropulsion (low
Reynolds number) environment and investigating strategies for optimizing its
performance. Two approaches to
performance optimization are through the jetting parameters (e.g., pulse
duration and frequency) and vehicle configuration (e.g., flow intake geometry
and placement). Current results from Robosquid show highest propulsive efficiencies are
obtained for short jet pulse length-to-jet diameter ratios (L/D)
where isolated vortex rings are formed.
As L/D increases, propulsive efficiency decreases and levels off above
the critical L/D (called the ‘formation number’) where the vortex ring pinches off
from the jet and the flow consists of a leading vortex ring followed by a
trailing jet. This behavior mirrors the
mode I and mode II behavior identified in swimming squid. The apparent benefit of short L/D
pulses is related to nozzle exit over-pressure that develops at the nozzle exit
plane during vortex ring formation as it accelerates additional ambient fluid
in the form of entrained fluid and added mass (fluid pushed out of the way as the
ring forms). The over-pressure provides
more thrust per unit of ejected fluid than can be obtained from a steady jet
with the same jet velocity, and therefore a lower velocity (higher efficiency)
jet can be used to obtain the same thrust.
Personnel: Ali Moslemi and Tyler Nichols
Publications:
P.S. Krueger, A.A. Moslemi, J.T. Nichols, I.K. Bartol, and W.J. Stewart, “Vortex Rings in Bio-inspired and Biological Jet Propulsion,” Advances in Science and Technology, pp. 237-246, Vol. 58, 2008.
J.T. Nichols, A.A. Moslemi, and P.S. Krueger,
“Performance of a Self-Propelled Pulsed-Jet Vehicle,” AIAA Fluid Dynamics
Conference, Seattle, WA, June 2008 (AIAA 2008-3720).
P.S.
Krueger, “Measurement of propulsive power and evaluation of propulsive
performance from the wake of a self-propelled vehicle,” Bioinspiration and Biomimetics, pp. S49 – S56, Vol. 1, 2006.
P.S.
Krueger, J.O. Dabiri, M. Gharib, “The Formation Number of Vortex Rings Formed
in Uniform Background Co-Flow,” Journal
of Fluid Mechanics, pp. 147 – 166, Vol. 556, 2006.
P.S.
Krueger, “An Over-Pressure Correction to the Slug Model for Vortex Ring
Circulation,” Journal of Fluid Mechanics,
pp. 427 – 443, Vol. 545, 2005.
P.S. Krueger and M.
Gharib, “Thrust Augmentation and Vortex Ring Evolution in a Fully-Pulsed Jet,” AIAA Journal, pp. 792 – 801, Vol. 43,
No. 4, 2005.
P.S. Krueger and M. Gharib,
“The Significance of Vortex Ring Formation to the Impulse and Thrust of a
Starting Jet,” Physics of Fluids, pp.
1271 – 1281, Vol. 15, No. 5, 2003.
P.S. Krueger, J.O.
Dabiri, and M. Gharib, “Vortex Ring Pinchoff in the Presence of Simultaneously
Initiated Uniform Background Co-flow,” Physics
of Fluids, pp. L49 – L52, Vol. 15, No. 7, 2003.
See also the article from the SMU Research magazine.

Acknowledgement: This material is based upon work supported by the National Science Foundation under Grant No. 0347958. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Squid Locomotion throughout Ontogeny
The heart of the squid locomotory system is a pulsed jet formed by repeated intake of fluid into the mantle (a large muscular organ enclosing an internal cavity) followed by contraction of the mantle and expulsion of the fluid through the funnel (nozzle). This study used digital particle image velocimetry (DPIV) to investigate the jet hydrodynamics and propulsive efficiency of squid jet locomotion throughout life history (from hatchling up to adult).
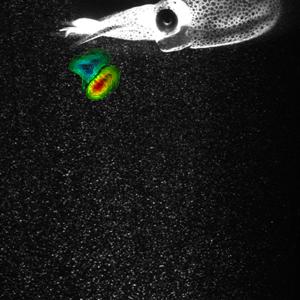
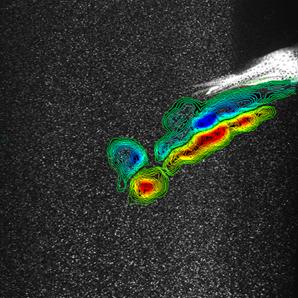
Several DPIV images of jetting squid are shown below. The two images on the left are from an adult brief squid (Lolliguncula brevis) and illustrate that later in life they utilize two jetting modes: short jet pulses leading to isolated vortex rings (mode I) and longer pulses with a leading vortex ring pinched off from a trailing jet (mode II). There was no speed preference for the modes over the speed range tested, but the propulsive efficiency of mode I was highest (69% for mode I and 59% for mode II).
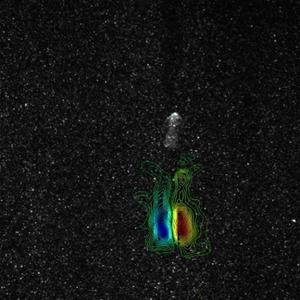
Squid hatchlings preferred shorter pulses that appear as isolated vortex rings or ‘elongated’ vortical structures as shown on the right below for a hatchling longfinned squid (Doryteuthis pealeii). Surprisingly, the average efficiency of the hatchlings was significantly higher than that of the adults (75% for the hatchlings vs. 67% for the juveniles/adults), even though the Reynolds number (Re) for the hatchlings is more than 100 times smaller. The higher efficiency of the hatchlings is due mostly to the preference for shorter pulses (and concomitant over-pressure benefits, see Robosquid project) and larger funnel diameters relative to juveniles/adults. These results not only illustrate the remarkable flexibility of squid propulsion but also give insight into propulsion system design for micro- or mini- scale systems.
|
|
|
|
|
Representative mode I jet from
brief squid (body length ~ 6 cm, swimming Re
~ 6500). |
Representative mode II jet from
brief squid (body length ~ 6 cm, swimming Re ~ 6800). Notice the leading vortex ring has pinched
off from the trailing jet. |
Representative jet from a
longfinned squid hatchling (body length ~ 2 mm, swimming Re ~ 20). |
Collaborators: Ian Bartol (Old Dominion University; lead PI) and Joe Thompson (Franklin & Marshall College)
Publications:
I.K. Bartol, P.S. Krueger, J.T. Thompson, W.J. Stewart, “Swimming dynamics and propulsive efficiency of squids throughout ontogeny,” Integrative and Comparative Biology, pp. 720 – 733, Vol. 48, No. 6, 2008.
P.S. Krueger, A.A. Moslemi, J.T. Nichols, I.K. Bartol, and W.J. Stewart, “Vortex Rings in Bio-inspired and Biological Jet Propulsion,” Advances in Science and Technology, pp. 237-246, Vol. 58, 2008.
P.S.
Krueger, “Measurement of propulsive power and evaluation of propulsive
performance from the wake of a self-propelled vehicle,” Bioinspiration and Biomimetics, pp. S49 – S56, Vol. 1, 2006.

Acknowledgement: This material is based upon work supported by the National Science Foundation under Grant No. 0446229. Any opinions, findings, and conclusions or recommendations expressed in this material are those of the authors and do not necessarily reflect the views of the National Science Foundation.
Return to Experimental Fluid Dynamics Lab Homepage
The contents of this Web site are the sole responsibility of Professor Paul Krueger and do not necessarily represent the opinions or policies of Southern Methodist University. The administrator of this site is Paul Krueger, who may be contacted at pkrueger@lyle.smu.edu.